  since 2004/11/19 |
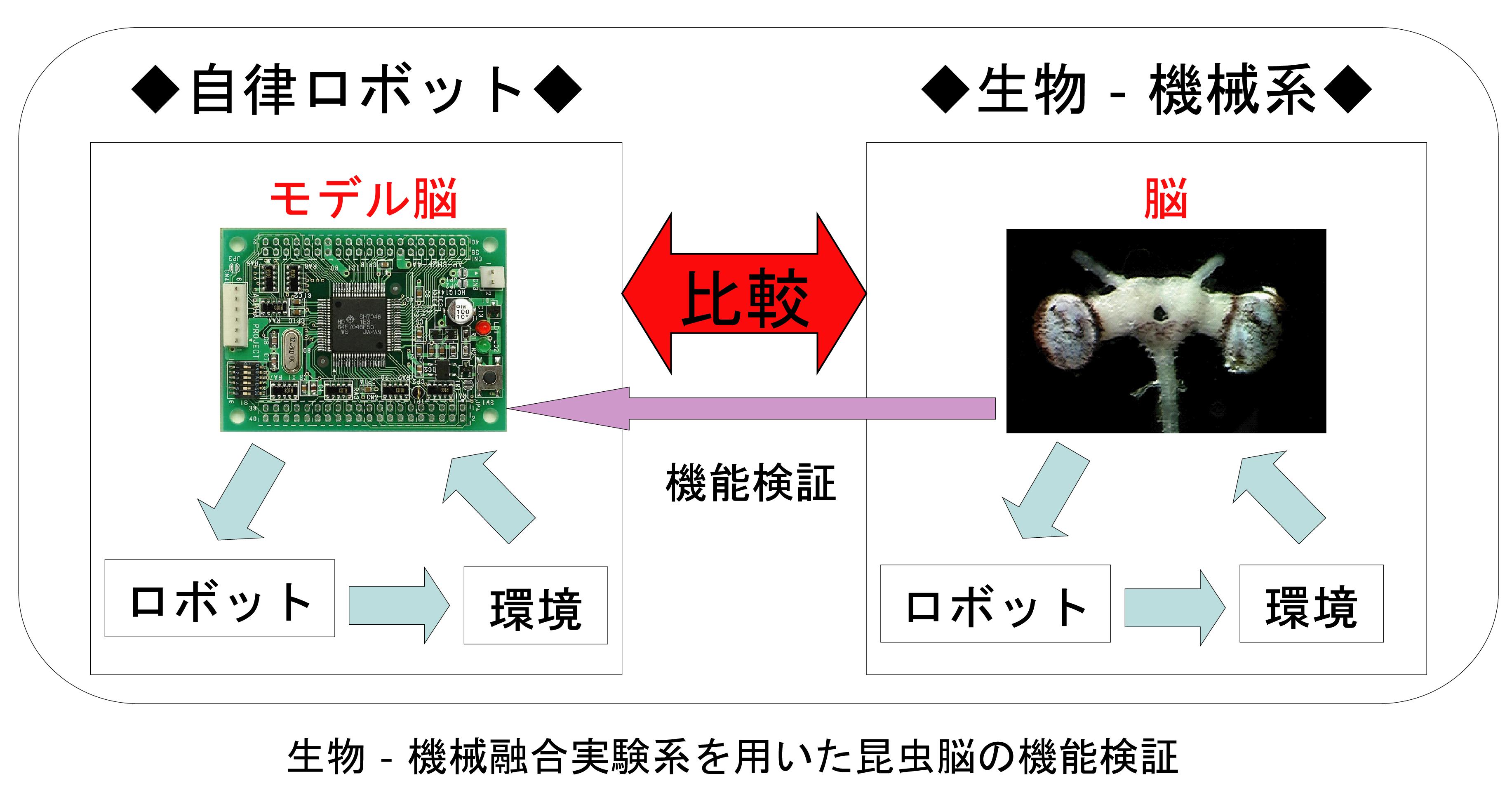
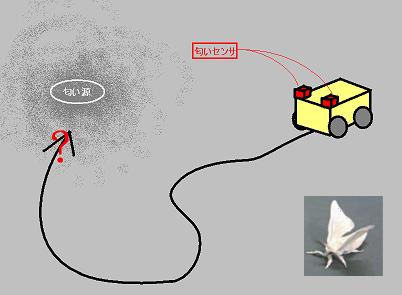
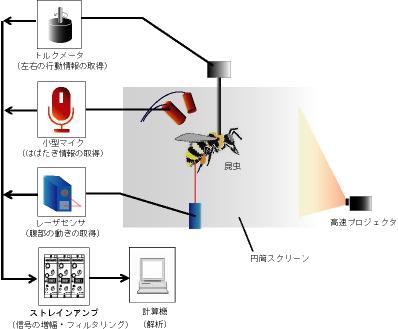
生体-機械融合システム 研究の目的 昆虫の一部の機能を機械で代替することで、高い環境適応性を示す昆虫の神経系の機能に焦点をあてた研究手法を確立する。 「環境適応的」とわれわれが判断する根拠は、刻々と変化する環境情報(入力)に対して、 出力情報が変化し、それによってもたらされる機能、 例えば生物の行動が生存や子孫の繁栄に役立つことにある。 しかし、従来の神経科学では、そのごく一部の機能や回路に注目し、 そこから全体機能の推測をしているに過ぎない。 逆にいわゆる「生物を規範とした」ロボットでは、 入出力情報を模倣した系の構築にとどまっている。 この「生体―機械融合システム」では、昆虫の神経、筋肉、行動といった さまざまな生体情報を抽出し、ロボットや機械を操作することで、 感覚フィードバック(環境情報)によって変化する生体情報の変化をリアルタイムにとらえ、 昆虫の持つ環境適応性の機能に迫ることを目指す。
トップへ戻る |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





{kind=link}